

NEXUS
-
System Designer Product Designer
-
4 Weeks (Design Sprint)
-
Cross Device Experience, UX Design, Design System
"In the modern cockpit, screens are competing for attention, not supporting intention."
The Challenge: As vehicles transition from mechanical tools to digital hubs, drivers are facing an unprecedented crisis of Cognitive Overload. Traditional navigation systems are "demanding"—they require active interpretation of complex 2D maps, constant voice interruptions, and manual input. This fragmentation of attention disconnects the driver from the road and erodes the joy of driving.
-
Figma, Blender, After Effects , Principle
-
It shifts the focus from simple A-to-B routing to contextual awareness. The system acts as the "digital connective tissue" between the vehicle and the Smart City, utilizing V2X data to anticipate the unseen—such as traffic flow changes or infrastructure signals—before they become visible to the human eye.
-
It eliminates information overload. Instead of demanding attention, the interface uses Ambient UI and AR-HUD to deliver guidance subconsciously. The car communicates intentions through light, sound, and predictive visuals, allowing the driver to navigate via instinct rather than instruction.
-
It aligns mobility with sustainability and well-being. The navigation prioritizes "Green Wave" eco-routing and smooth driving patterns, transforming the chaotic commute into a seamless, energy-efficient "flow state" that respects both the driver’s mental space and the urban environment.
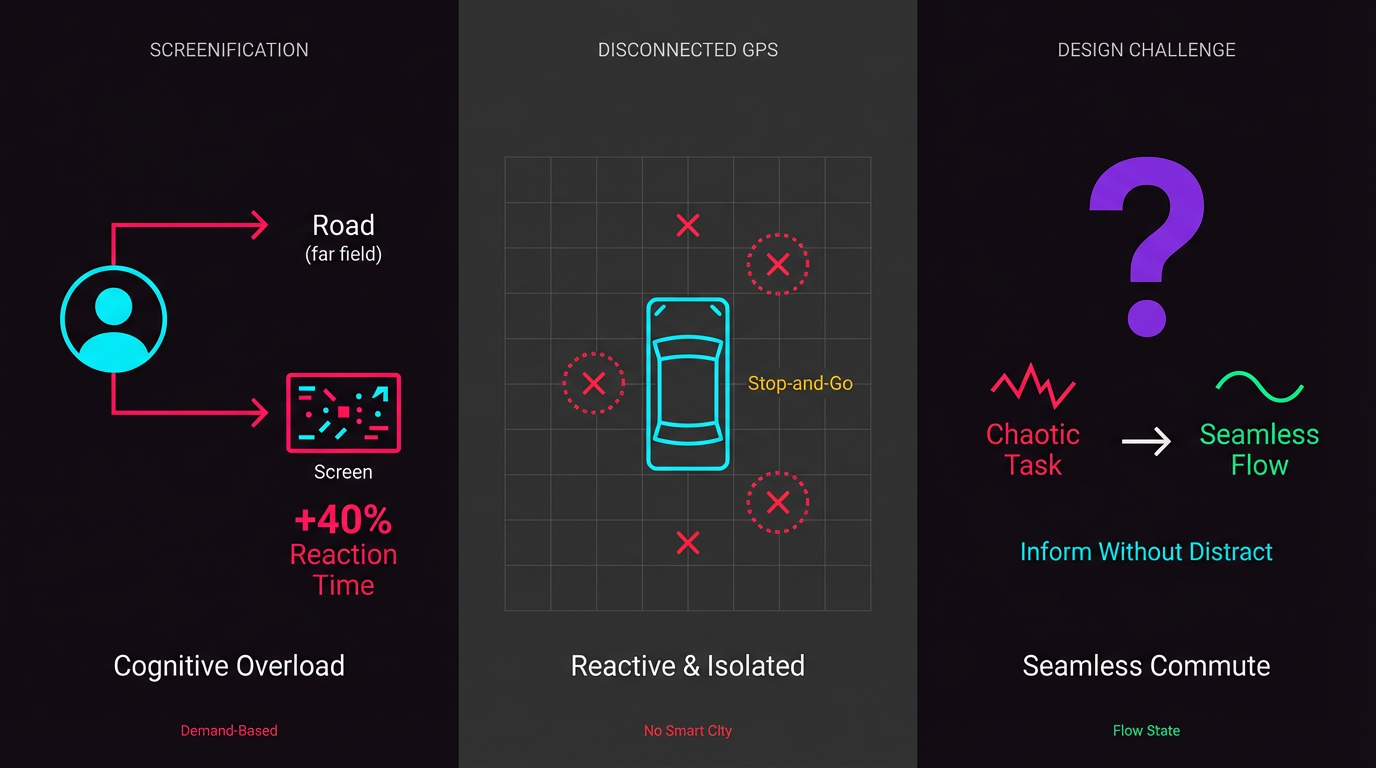
1.0 The Challenge: The Crisis of Attention
-
In the transition from mechanical tools to "digital hubs," modern vehicles have inundated drivers with information. Traditional navigation systems suffer from "Demand-Based Interaction": they require the driver to actively decode complex 2D maps, interpret text-based notifications, and react to jarring voice commands. This forces the driver to constantly switch focus between the road (far field) and the screen (near field), causing Cognitive Overload and increasing reaction times by up to 40%.
-
Furthermore, standard GPS is reactive and isolated. It treats the car as a solitary object moving through static space, ignoring the rich web of data available from the Smart City (V2X). This results in "stop-and-go" driving patterns that are stressful for the driver and wasteful for the environment.
-
How might we design a cockpit that informs the driver without distracting them, transforming the commute from a chaotic task into a seamless flow?
2.0 The Strategy: Three Pillars of Sustainable Autonomy
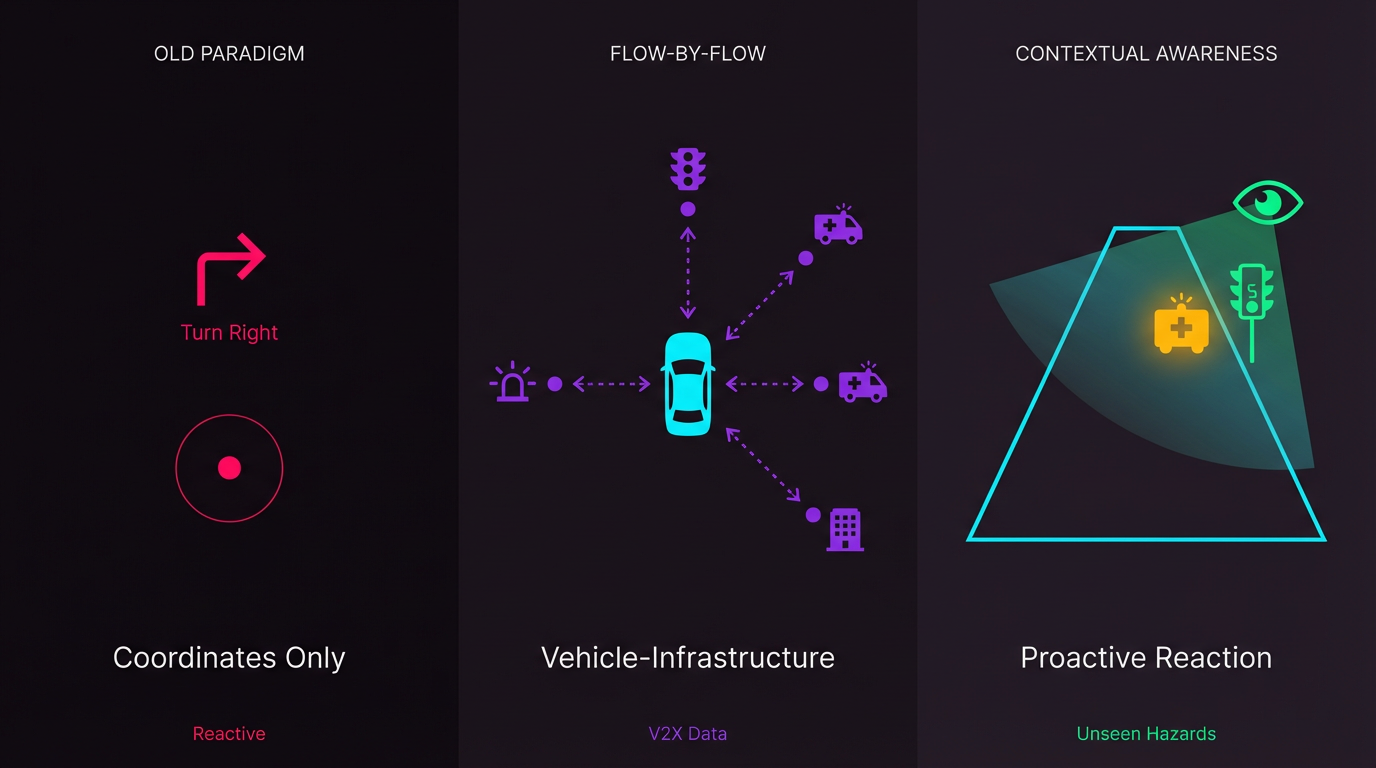
Pillar 1: Beyond Coordinates (Contextual Awareness)
-
Shift from "Turn-by-Turn" to "Flow-by-Flow."
-
The system acts as the "Digital Connective Tissue" between the vehicle and the infrastructure. Instead of just showing where to turn, it visualizes what is happening ahead.
-
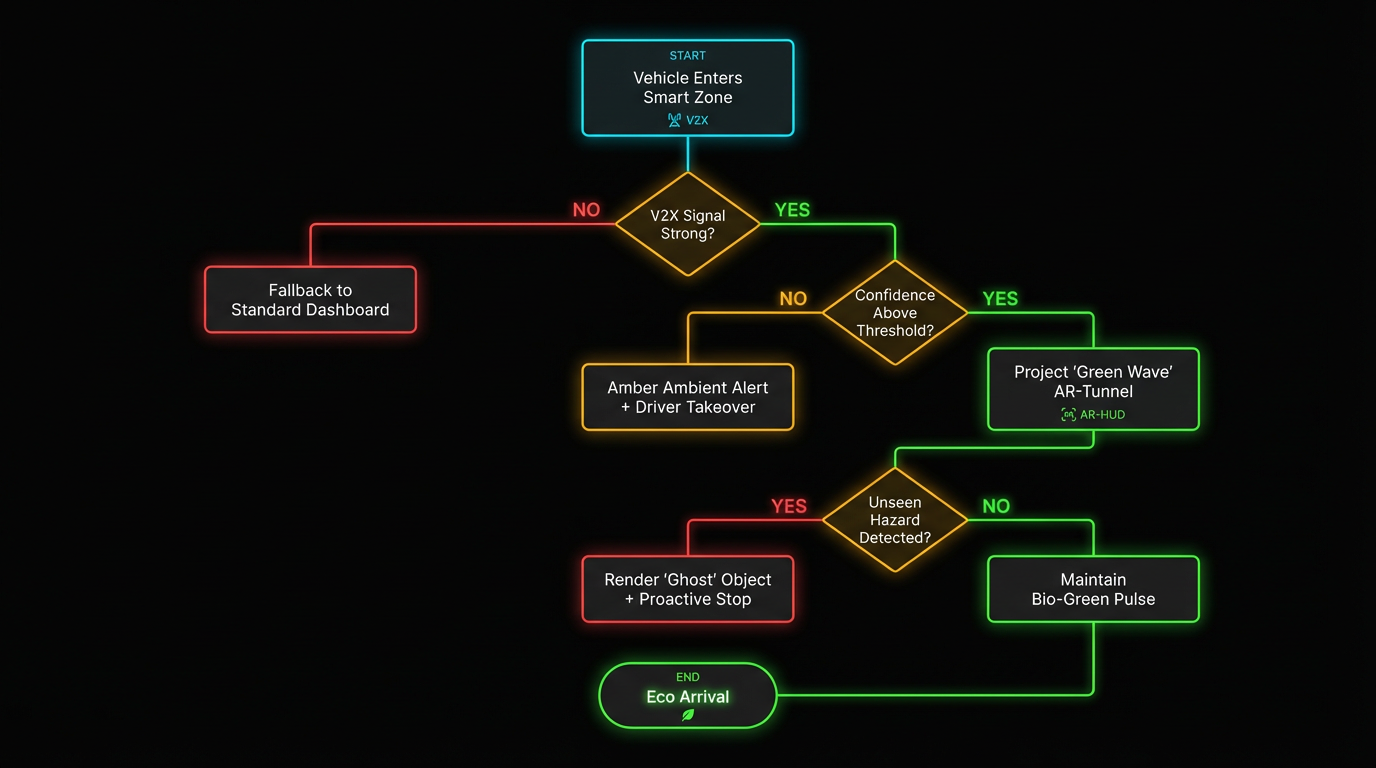
Using V2X (Vehicle-to-Everything) data, the system anticipates unseen hazards (e.g., an ambulance approaching from a blind intersection) and traffic signal changes before they are visible to the human eye. This data is not presented as a notification but as a subtle alteration in the environmental display, allowing the driver to react proactively rather than creatively.
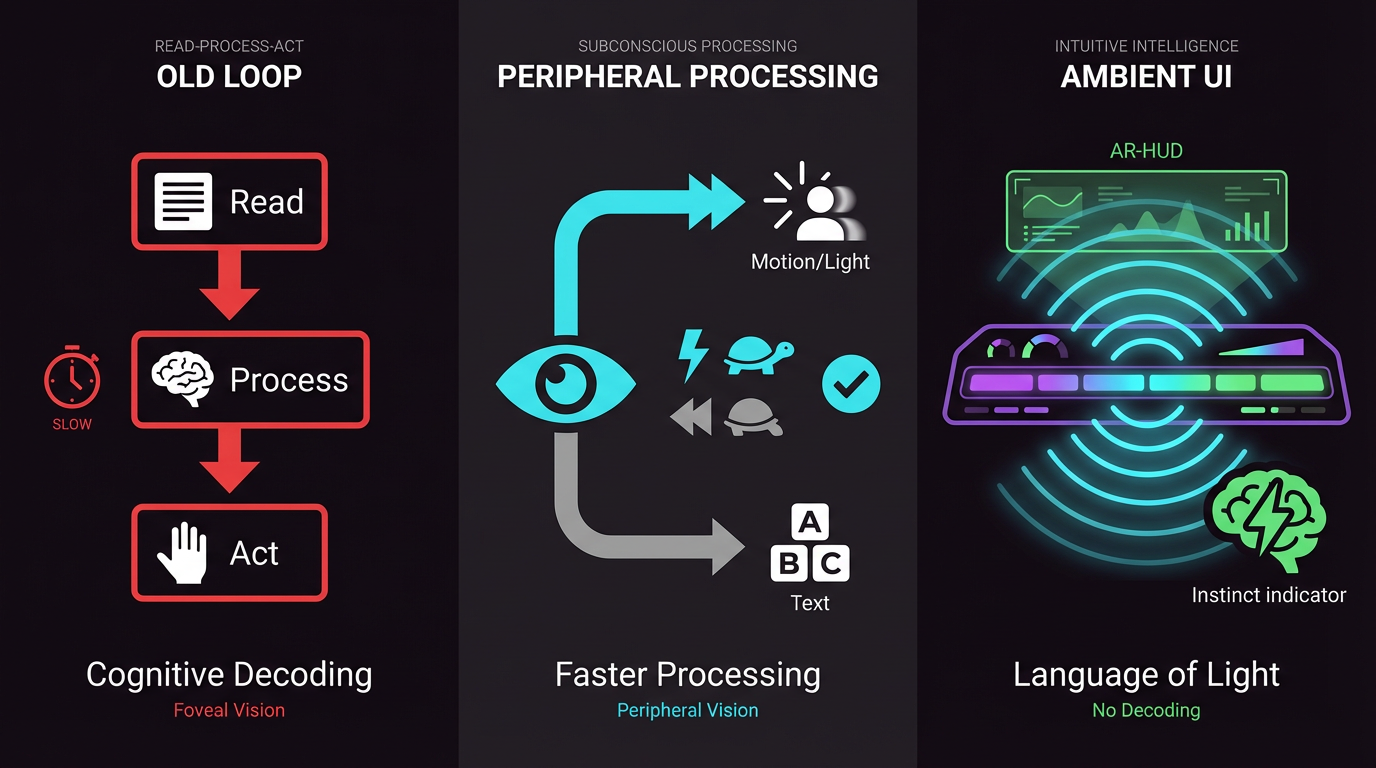
Pillar 2: Intuitive Intelligence (Subconscious Processing)
-
Eliminate the "Read/Process/Act" loop.
-
Leverage Peripheral Processing. Humans process motion and light color faster in their peripheral vision than they process text in their foveal (central) vision.
-
The interface uses Ambient UI (LED strips on the dashboard/pillars) and an AR-HUD (Head-Up Display). Information is delivered via light pulses and color shifts—a "language of light" that the driver understands instinctively, bypassing the need for cognitive decoding.
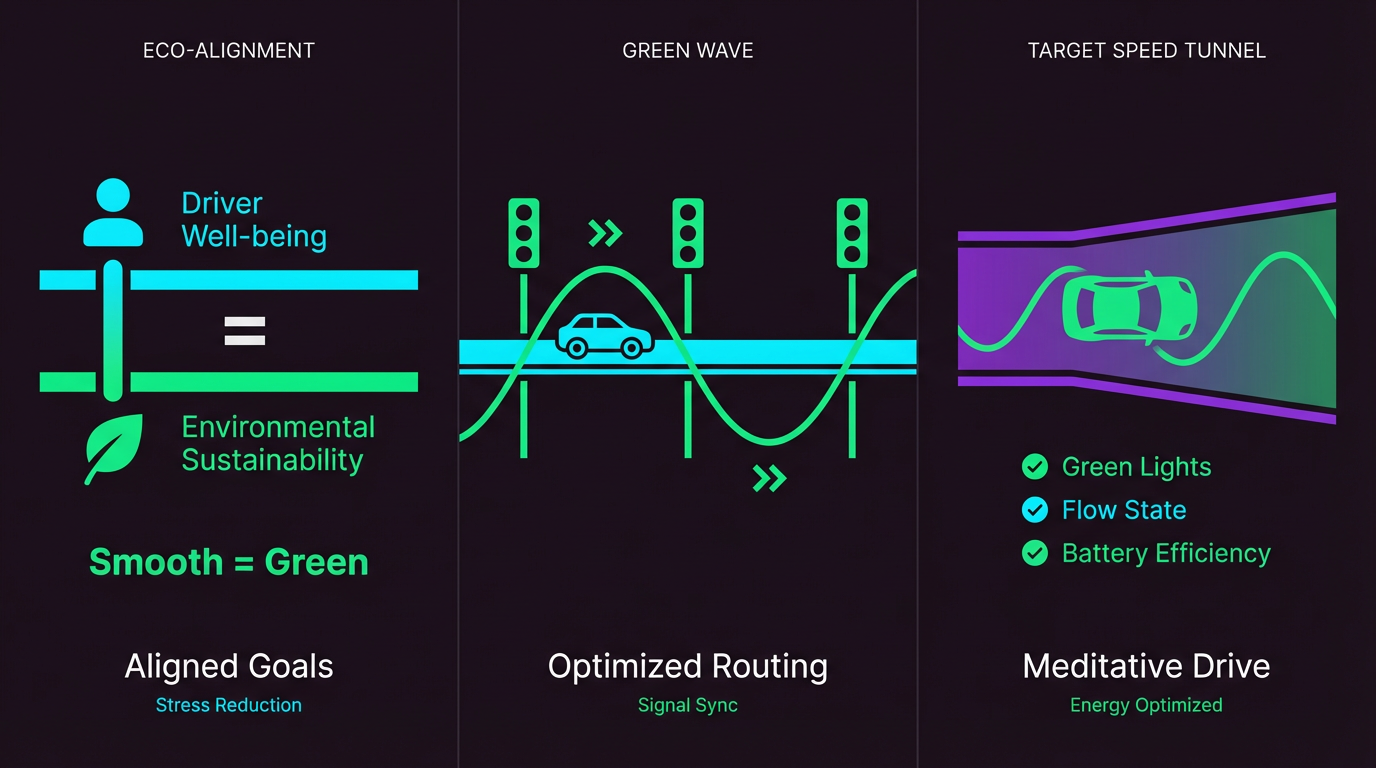
Pillar 3: The Conscious Journey (Eco-Alignment)
-
Align driver well-being with environmental sustainability.
-
Smooth driving is green driving. By reducing stress (hard braking/acceleration), we automatically reduce energy consumption.
-
The navigation prioritizes "Green Wave" routing. It visualizes a "target speed tunnel" in the HUD. If the driver stays within this flow, they are guaranteed to hit green lights, transforming the drive into a meditative "flow state" that optimizes battery/fuel efficiency.
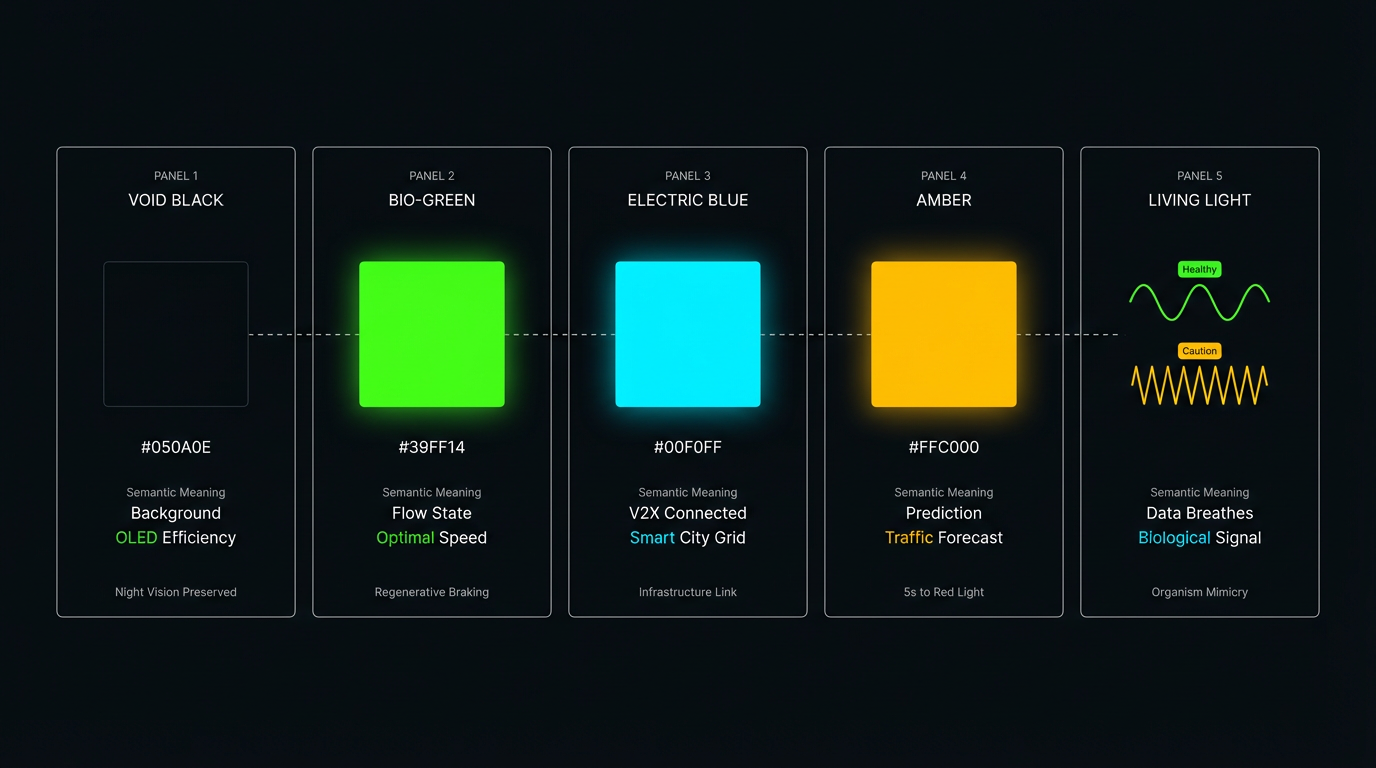
3.0 The Design System: "Bioluminescent" Aesthetics
We developed a visual language called "Electric Bioluminescence", inspired by deep-sea organisms. This is not just an aesthetic choice; it is a functional requirement for low-light environments.
4.0 Interface Features: The "Glass Box" Experience
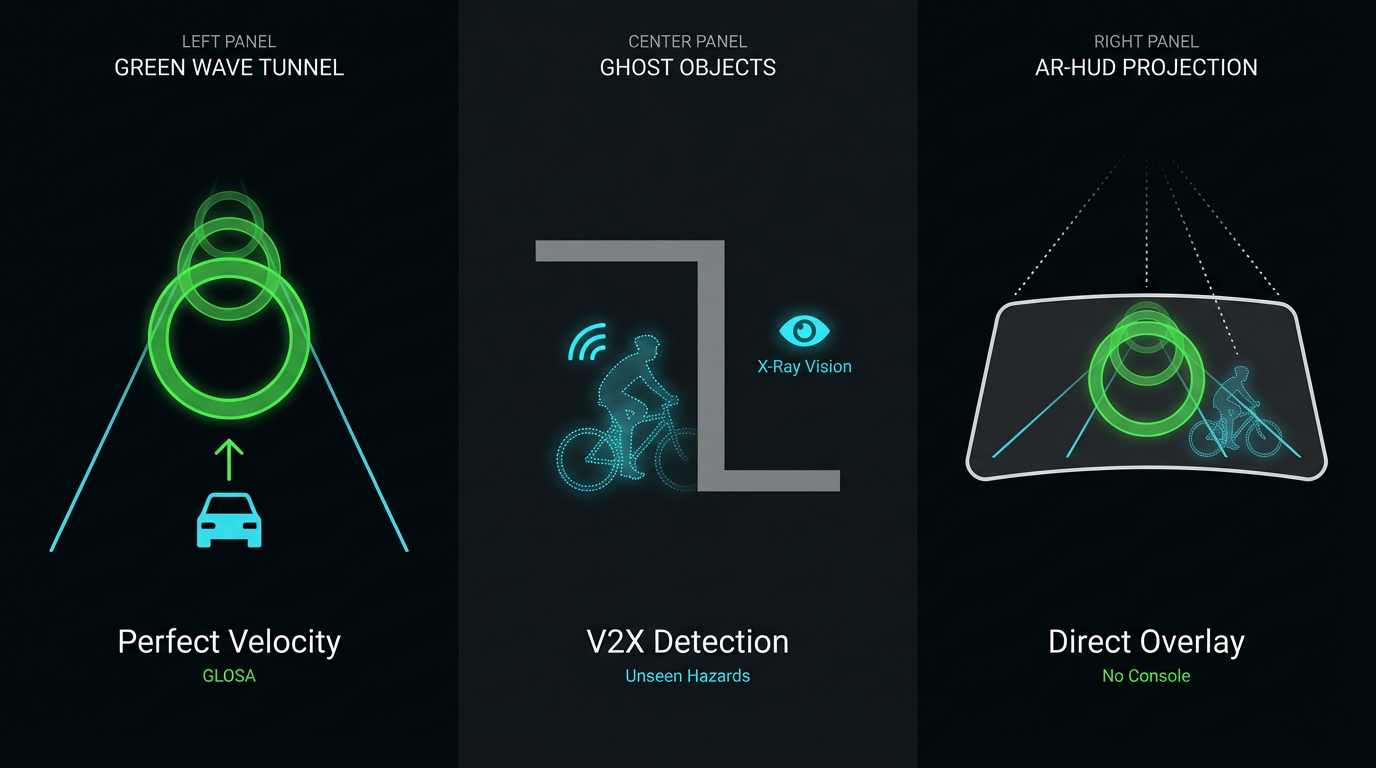
4.1 The AR-HUD: Visualizing the Unseen
-
A series of floating, semi-transparent green hoops projected onto the lane.
-
"Keep your car inside the tunnel."
-
The system calculates the perfect velocity to arrive at the next intersection exactly when the light is green (GLOSA - Green Light Optimal Speed Advisory).
-
When V2X detects a cyclist hidden around a corner, the HUD renders a "Ghost" outline of the cyclist through the building, giving the driver "X-Ray vision."
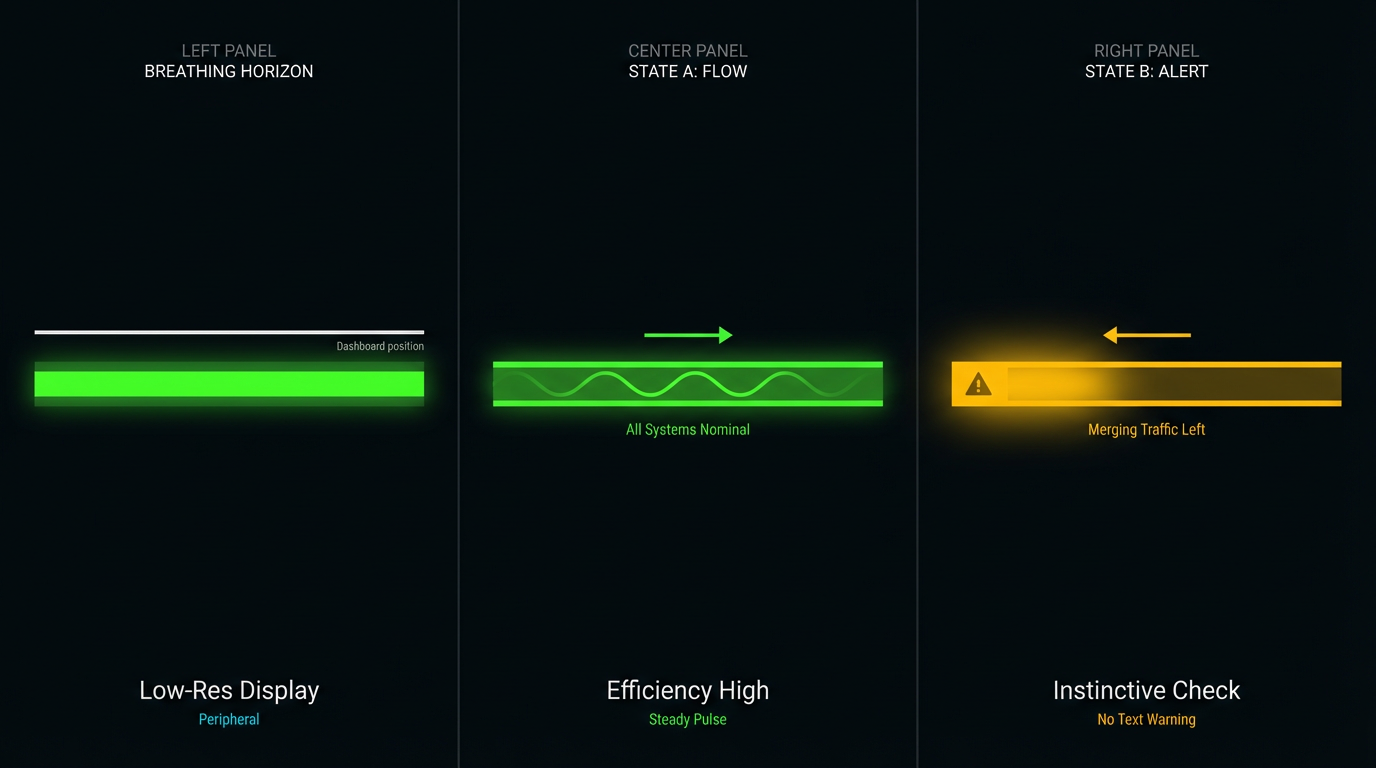
4.2 Ambient Dashboard: The Peripheral Co-Pilot
-
A light strip runs across the base of the windshield.
-
A steady, slow green pulse moving left-to-right. (Meaning: "All systems nominal, efficiency high.")
-
The light pools to the left side and turns amber. (Meaning: "Merging traffic detected on the left.")
-
The driver sees this "movement" out of the corner of their eye and instinctively checks the left mirror, without ever taking their eyes off the road to read a text warning.

4.3 Trust Calibration: The Confidence Glow
-
The AR lane markers are crisp, solid neon lines.
-
If heavy rain obscures sensors, the lane markers become "fuzzy" and diffuse.
-
This intuitive visual metaphor tells the driver "I'm not sure, please take over" without needing a loud alarm, fostering a "Calibrated Trust" relationship.
5.0 Impact & Future Roadmap
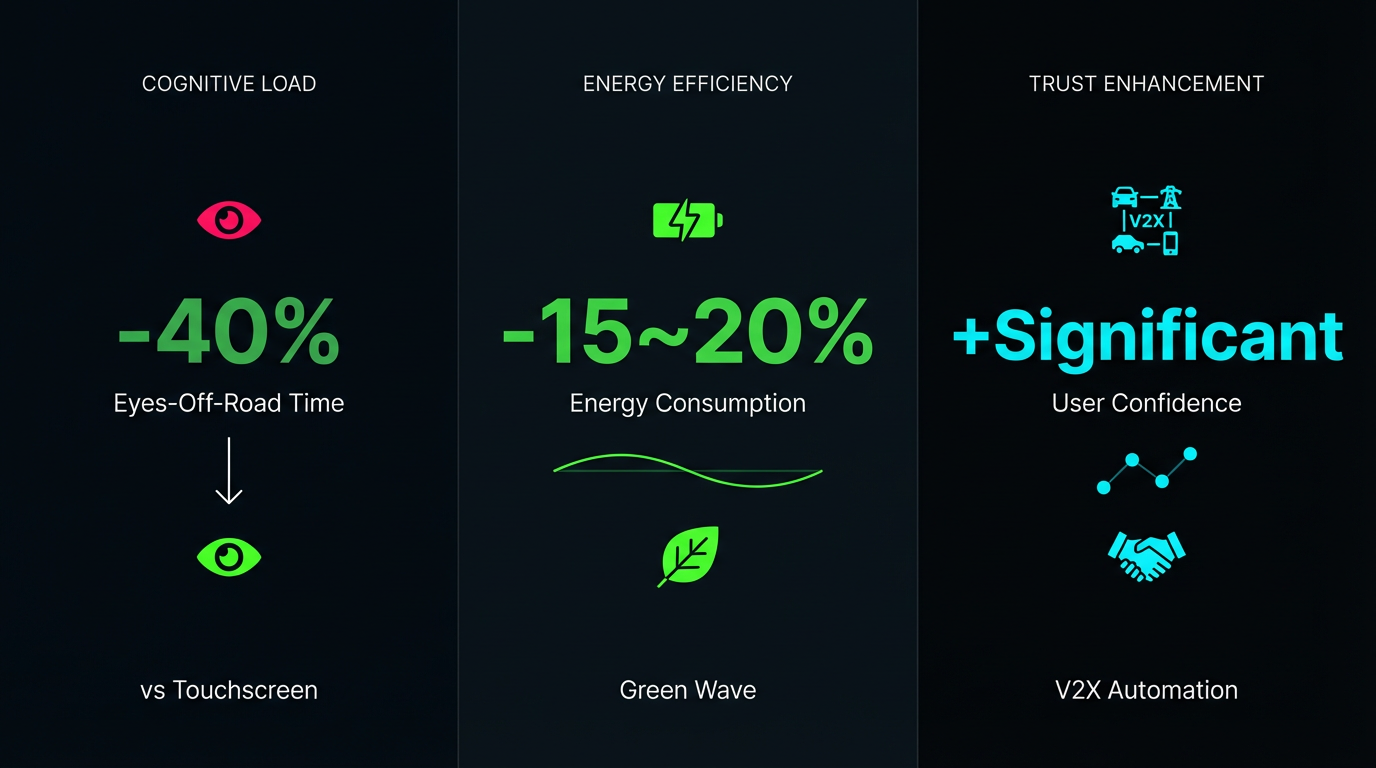
5.1 Predicted Metrics
-
40% reduction in "eyes-off-road" time compared to traditional touchscreens.
-
15-20% reduction in energy consumption due to "Green Wave" velocity optimization.
-
Significant increase in user confidence during V2X automated interventions.
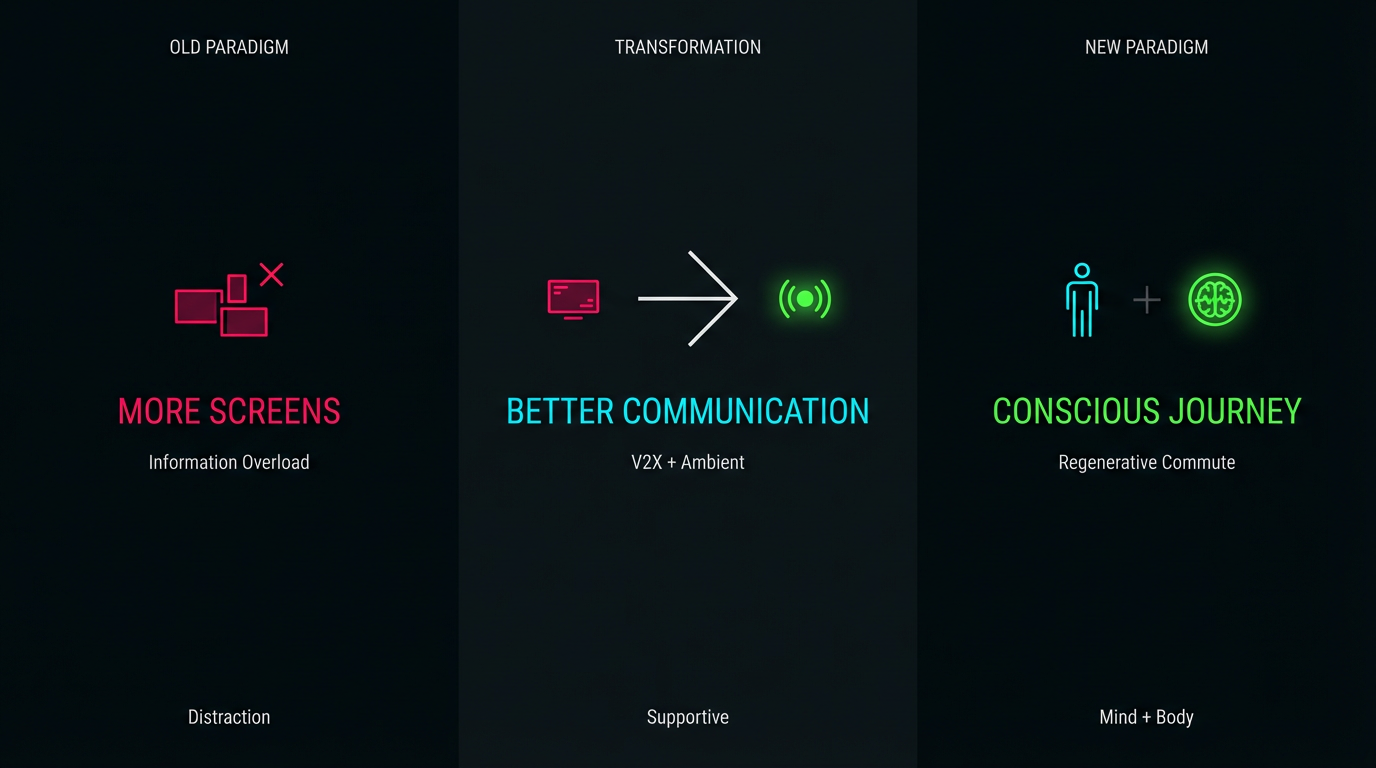
5.2 Conclusion
The Sustainable Autonomy Interface proves that the future of mobility isn't about more screens—it's about better communication. By leveraging V2X data and ambient design, we can create a vehicle that doesn't just transport the body, but supports the mind, turning the daily commute into a conscious, regenerative journey.